智慧交通系統(tǒng)作為城市智慧化的核心組成部分��,正深刻地改變著人們的出行模式��。在這一變革過程中,車載無線終端作為車輛與道路信息交互的核心樞紐��,發(fā)揮著至關重要的作用�����。它不僅實現(xiàn)了車與車�����、車與路之間的互聯(lián)互通,更將車輛與交通管理中心緊密地聯(lián)系在一起��,共同構(gòu)建了一個覆蓋全城��、高效協(xié)同的交通網(wǎng)絡體系��。
車聯(lián)網(wǎng)
車聯(lián)網(wǎng)的快速發(fā)展,標志著智慧交通進入了一個新的發(fā)展階段���。通過車載無線終端���,每一輛汽車都被納入了這個龐大的網(wǎng)絡之中��,成為了一個個智能節(jié)點��,能夠?qū)崟r地進行信息交換,共同優(yōu)化交通環(huán)境。車聯(lián)網(wǎng)的應用范圍廣泛,具體體現(xiàn)在以下幾個方面:
車輛監(jiān)控:交通管理部門借助車載終端,能夠?qū)崟r獲取車輛的行駛速度�����、方向等關鍵信息���,及時發(fā)現(xiàn)并糾正交通違規(guī)行為���,從而有效預防交通事故的發(fā)生���。
智能交通指揮:通過對車輛數(shù)據(jù)的收集與分析��,交通管理中心能夠智能地調(diào)度指揮交通流量��,優(yōu)化信號燈的配時方案,確保道路的暢通無阻���。
區(qū)段測速測距:車載終端能夠精確測量車輛間的距離和速度,為行車安全間距提供保障,有效避免追尾等交通事故的發(fā)生。
智能泊車:結(jié)合物聯(lián)網(wǎng)技術(shù)���,車載終端能夠感知并識別空閑車位,為駕駛員提供智能泊車指引,有效緩解停車難的問題�����。
公共交通:智能化管理的典范
公共交通
公交智能調(diào)度:公交公司利用車載終端��,能夠?qū)崟r監(jiān)控公交車的運行狀況及載客量��,并根據(jù)實際情況動態(tài)調(diào)整發(fā)車間隔��,確保乘客出行的便捷性���。
公交優(yōu)先通行:當公交車接近交叉口時�����,車載終端能夠向交通管理中心發(fā)送信號,自動調(diào)整信號燈以實現(xiàn)公交車的優(yōu)先通行���,減少其等待時間。
客流統(tǒng)計分析:車載終端能夠準確統(tǒng)計乘客的上下車數(shù)據(jù)��,為公交公司優(yōu)化線路布局、提高載客效率提供科學依據(jù)�����。
出租車精準調(diào)度:出租車公司借助車載終端���,能夠?qū)崟r掌握空駛出租車的位置及載客情況�����,實現(xiàn)精準調(diào)度���,有效縮短乘客的等待時間��。
無人駕駛
隨著無人駕駛技術(shù)的不斷成熟,車載無線終端在無人駕駛商用車輛中的應用也日益廣泛。基于高精度車載終端和感知系統(tǒng),無人駕駛商用車能夠?qū)崿F(xiàn)智能化運輸,為物流���、客運等行業(yè)帶來顛覆性的變革。具體功能包括:
精確定位:車載終端結(jié)合衛(wèi)星導航和路網(wǎng)地圖,能夠?qū)崿F(xiàn)車輛的實時精準定位��,確保行駛路線的準確無誤���。
智能路線規(guī)劃:根據(jù)路況信息和任務目標���,車載終端能夠動態(tài)地規(guī)劃行駛路線��,以提高運輸效率。
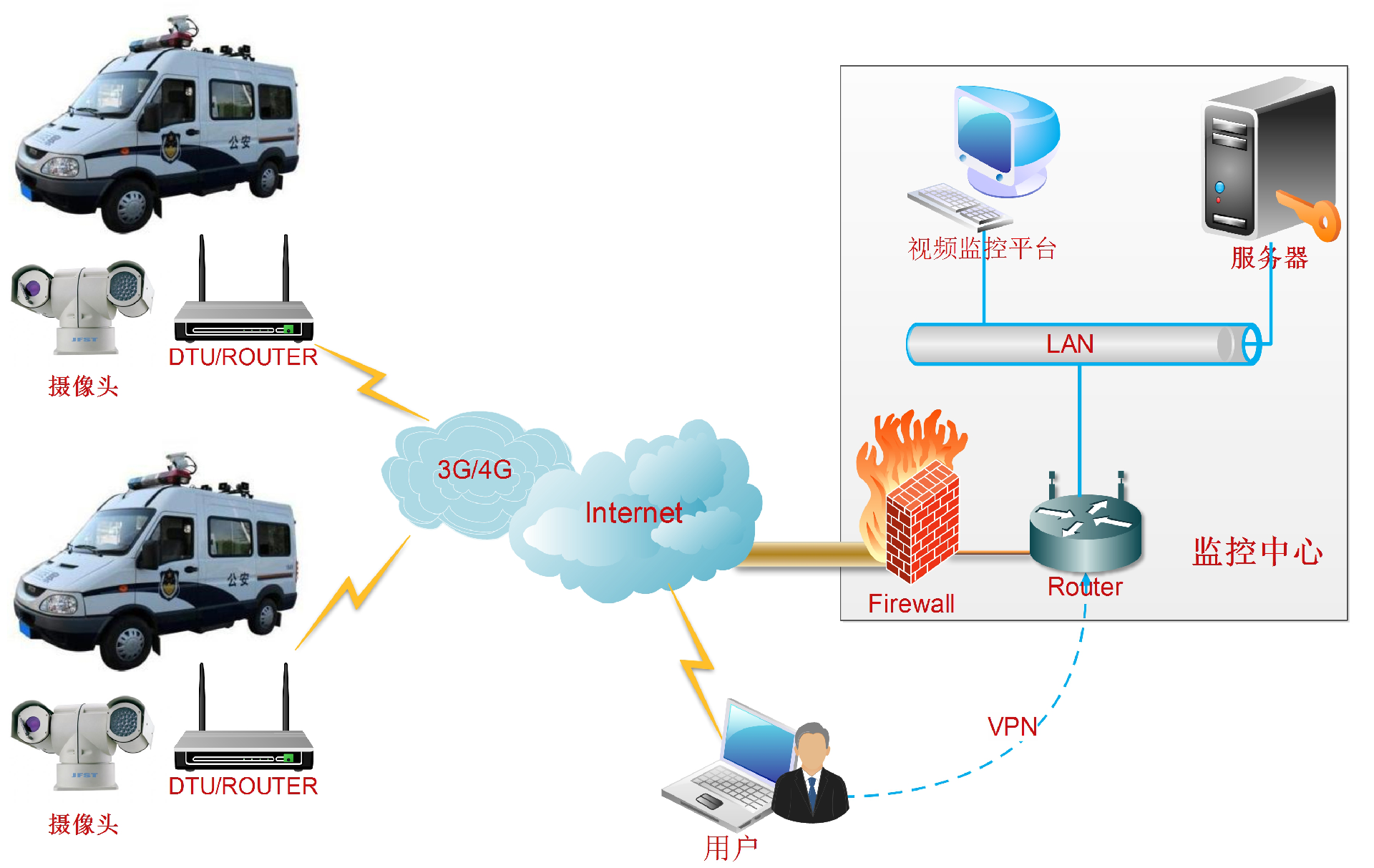
遠程遙控指揮:在必要時���,管理人員可以通過車載終端對車輛進行遠程遙控和監(jiān)控,確保車輛的安全行駛�����。
自動防碰撞:借助車載感知系統(tǒng)��,無人駕駛商用車能夠?qū)崟r監(jiān)測附近的車輛及障礙物���,并自動進行剎車和轉(zhuǎn)向避讓�����,從而確保行車安全。
系統(tǒng)部署與工作流程

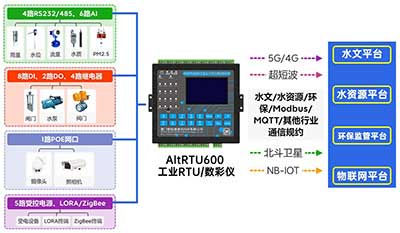
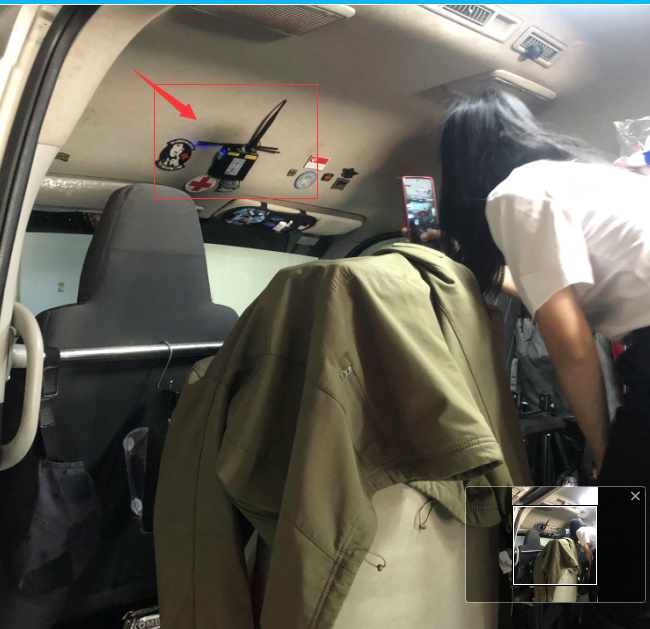
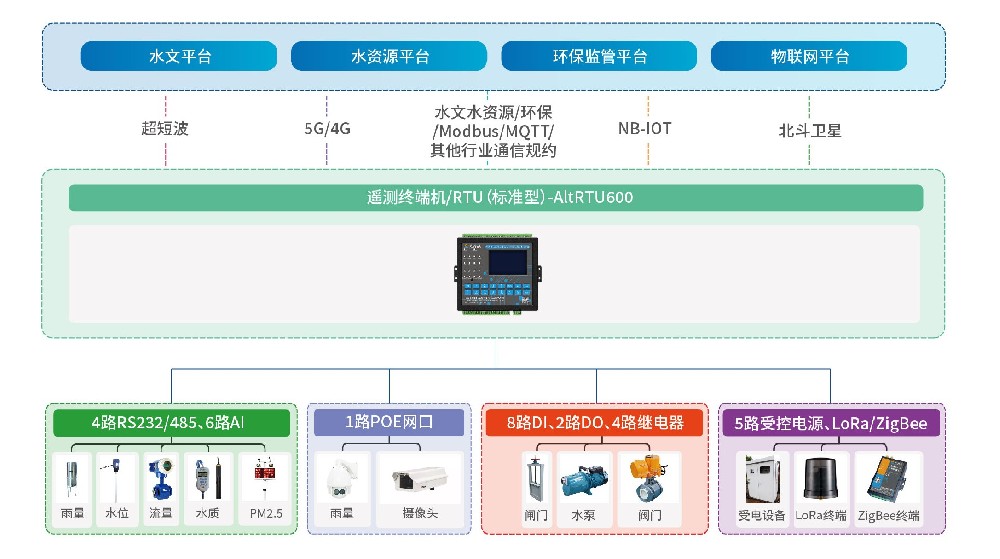
在智慧交通系統(tǒng)的部署過程中�����,車載無線終端作為核心組件���,其性能的穩(wěn)定性和可靠性至關重要�����。一個典型的車載無線終端系統(tǒng)部署通常包括以下幾個關鍵方面:
車載主控制器:集成了音視頻解碼���、Android系統(tǒng)、4G通信等多種接口,能夠支持各類車載攝像頭的插拔和圖像處理���,為車輛提供全方位的監(jiān)控和通信能力。
數(shù)字油門踏板連接:通過連接數(shù)字油門踏板,車載終端能夠?qū)崟r獲取車速等數(shù)據(jù),并根據(jù)需要下發(fā)控制指令以調(diào)節(jié)車速��,實現(xiàn)車輛的精準控制���。
CAN總線通信:借助CAN總線技術(shù)���,車載終端能夠獲取無人車的各種狀態(tài)數(shù)據(jù)(如電量���、溫度等)��,確保對車輛運行狀態(tài)的實時監(jiān)測�����。
4G通信網(wǎng)絡:通過4G通信網(wǎng)絡�����,車載終端能夠與車隊管理平臺進行實時通信,接收遙控指令�����,實現(xiàn)遠程管理和調(diào)度��。
在系統(tǒng)工作流程方面��,以無人駕駛商用車的物料搬運任務為例進行說明:
任務下發(fā):工廠管理系統(tǒng)將物料搬運任務分配給指定的無人車。
路線與速度規(guī)劃:無人車接收到任務后�����,會根據(jù)路況信息和任務目標動態(tài)地規(guī)劃行駛路線和速度���。
環(huán)境感知與運動控制:在行駛過程中�����,無人車通過車載傳感器實時感知周圍環(huán)境,并根據(jù)感知數(shù)據(jù)進行運動控制���,以確保安全行駛。
任務完成上報:到達目的地后,無人車會通過車載終端向管理系統(tǒng)上報任務完成信息�����,以便管理系統(tǒng)進行后續(xù)處理���。
無線路由器|全網(wǎng)通網(wǎng)關|DTU|RTU|數(shù)采儀|遙測終端機|嵌入式網(wǎng)關|云平臺開發(fā)-廈門愛陸通")